

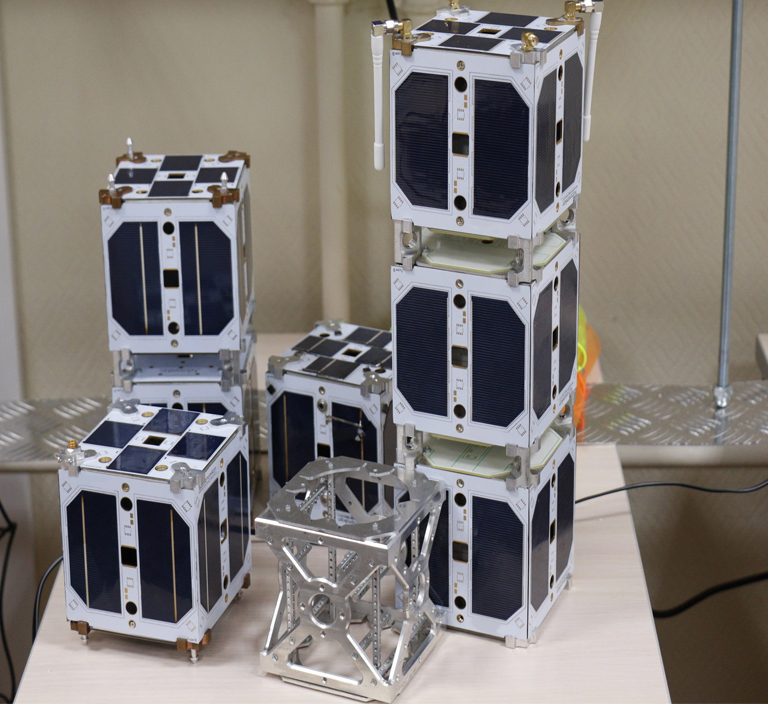
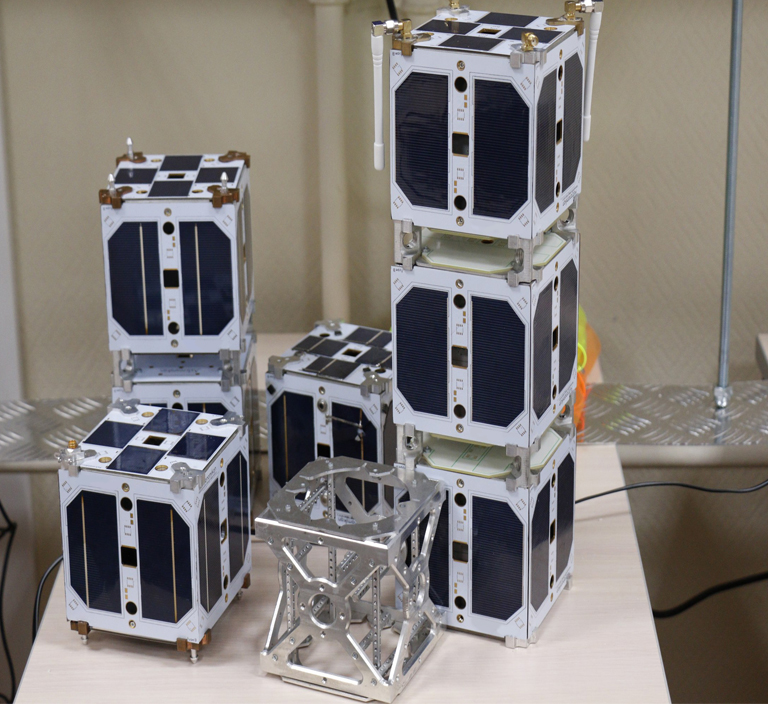
The Multipurpose Block-Modular Platform
- Purpose: The product: ultra-low-class spacecraft on CubeSat form-factor, as well as nano- and picosatellites is intended for scientific, educational and technological experiments in space. Development of engineering solutions for nanosatellites.
- Year of release: 2015
- Guaranteed service life (years): 5
- Estimated production / delivery time (months): 16
- Flight qualification of the product: No
- Possibility to adapt the product to customer requirements: Yes
| Parameter | Value |
|---|---|
| Weight 3U without payload (kg) | 2.5 |
| Dimensions 3U (mm) | 100х100х340.5 |
| Maximum available volume for payload | 2.5U |
| Power supply voltage and current | 6A - 3.3V; 8A - 5V |
| Battery capacity (Wh) of power system | 140 |
| Average power for payload (W) | 5 |
| Interfaces for payload | UART, SPI, I2C, Ethernet, USB, SpaceWire, CAN, CSI |
| Orientation accuracy of magnetic frames / gyrodin (deg.) | 10/0.1 |
| Radio channel speed: basic (kbit/s) and advanced (mbit/s) | 0.1-115 and 1.6-100 |
| Working orbit (km) | up to 1500 |
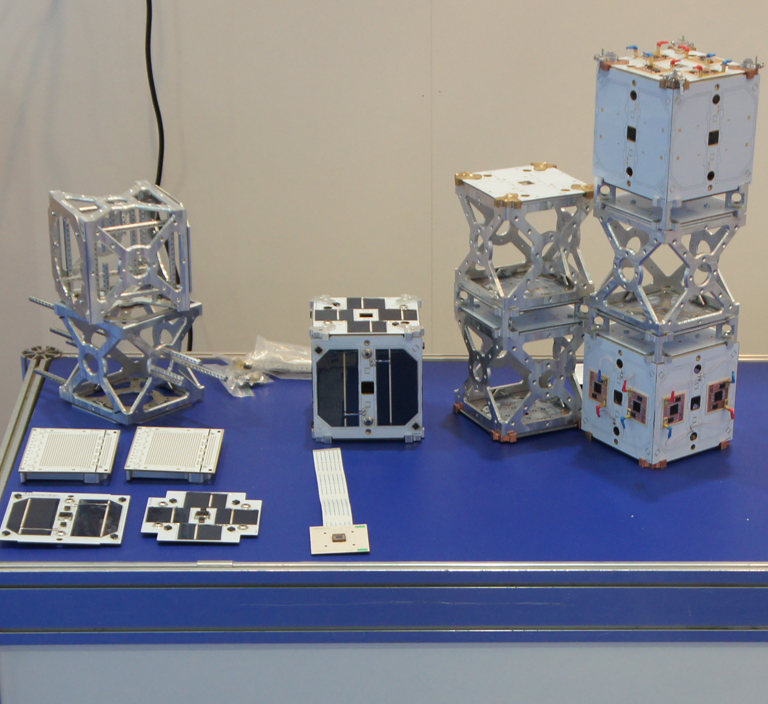
Constructor for assembling nanosatellites from 1U to 12U of the CubeSat form-factor. Dimensions of modules for assembling 100х100х100 mm.
Features:
- leaky;
- a passive thermal control system;
- on-board subsystems are duplicated and have an independent power supply;
- optical commutation subsystems;
- sensors and M-frames as standard;
- for design of the technological model, equipment in simplified versions is possible.
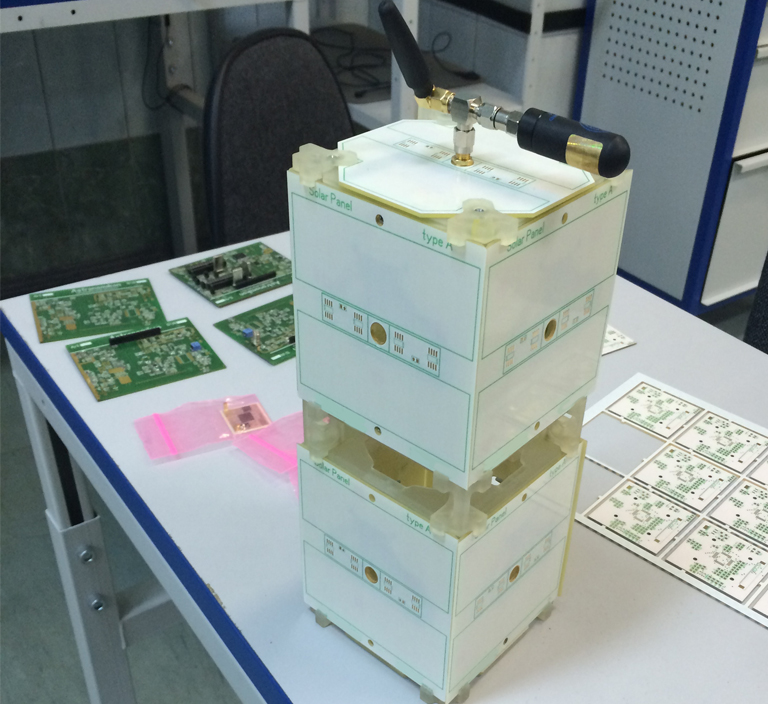
The structure of the onboard sub-systems include:
- on-board control complex "Hydra". Miniature single board computer.
- on-board radio complex "Polymorph". SDR with two independent transmit/receive channels.
-
system of telemetric control "Inter". CCSDS telemetry generation from sensors:
- temperature sensor;
- infrared sensor;
- MEMS three-axis accelerometer-gyroscope-magnetometer;
- radiation sensor;
- emission recorder.
- orientation and stabilization system "Vortex".
Determination of position in space using the optical sensor, GPS/GNSS. Management of M-frames and gyrodyne
Remark:
The stage of manufacturing prototypes and conducting autonomous tests.
Legal information
Please note that this site is for informational purposes only and under no circumstances is not a public offer determined by the provisions of the Part 2 Article 437 of the Civil code of the Russian Federation.
Information on this site may be changed or supplemented.
{kind=link}
{kind=link}
{kind=link}
{kind=link}